|
UNIVERSAL MOBILE PLATFORM (TROLLEY) Integration Engineering Laboratory University of California, Davis |
| Trolley Home | Design | Images | Detectors | Contacts |
| Support Structure | Control System | Power System | Maintenance | Technical Details |
|
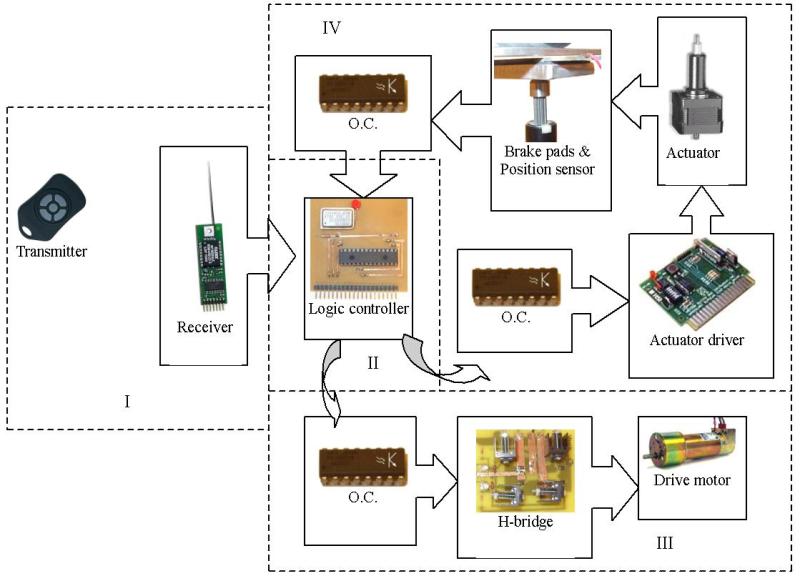
Control would be achieved using a combination of remote control and onboard intelligence. The operator/maintenance person would use the controls to get the trolley to the desired position above the freeway. Intelligence, programmed into the controlling device, would check to make sure the necessary steps were taken to allow correct operation.
• Engaging the brakes: Lock trolley in place to allow detector to begin operation. • Disengaging the brakes: Creates a 5mm gap between the brake pads and the tracks so trolley can be moved into position. • Move left/right. The trolley will keep moving left/right as long as the move key(s) are pressed. • Increase/decrease preset speed. The moving speed can be preset and adjusted by the operator. It will be kept in memory until it is changed again. • Step left/right: In the case of precise adjustments, the operator’s reaction time is too slow in response to the trolley’s movement. Most of the time, the trolley has already moved passed the desired location when the operator releases the move key(s). Thus, a step-move function is needed to solve this problem. This function moves the trolley a specified interval regardless of how long the step key is held. Only after the key is released and pressed again will the trolley move another step. The remote control device doesn’t always follow operator commands for the sake of device safety. For instance, the operator may issue a command that could possibly damage the trolley, such as forgetting to engage the brakes to lock the trolley to the tracks. To manage such instances, the sensors of the system are aware of current operating conditions independent of the operator. Therefore, the remote control system can execute or override the operator’s commands, as well as, execute commands independently as the situation requires to prevent hardware damage. |
|