Information
The modular robot design incorporates four controllable degrees of freedom, two joints in the center section and two rotating faceplates at the ends. The two joints can rotate 180 degrees, while the faceplates at the ends can continuously rotate. This allows the module to turn while crawling and to drive as though with wheels. This significantly increases the mobility of each module, enabling it to traverse a wide variety of terrains.
Motion
This modular robot design is capable of several types of novel locomotion without sacrificing basic mobility. Some of the operating modes are:
- Crawling
- The most basic motion for a modular robot is crawling. The method of crawling along the ground can be slow, but extremely effective on difficult terrain.
- Driving
- The iMobot moves forward by continually rotating the faceplates. If the module requires more clearance while driving in rough terrain it can arch in the center
- Camera Platform
- One of the more unique operating modes is where the module lifts itself into a camera platform. This is a capability unique to this modular robot design and is made possible by the rotating faceplate.
Configurability
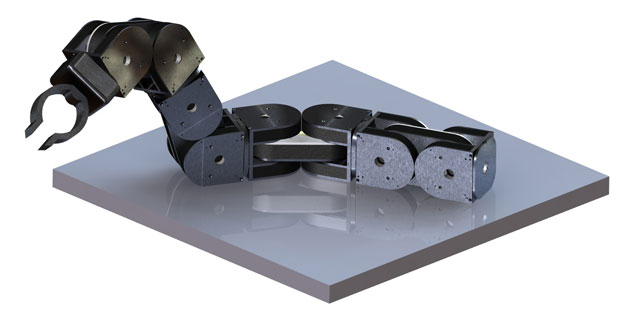
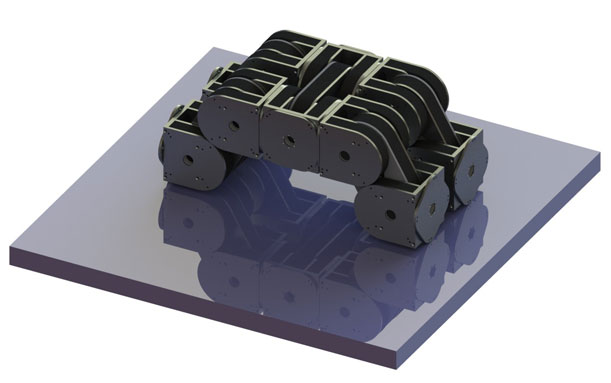
The modular design allows many modules to be assembled together to create larger, complex shapes capable of complex movement. Two possible configurations are shown below. The snake configuration allows easy navigation of small spaces not reachable by humans. The truck configuration can quickly and easily traverse open terrain much faster than an individual module.
 |
 |