Ch Robot Package
The Ch Robot package is an open source middleware for the collaborative control of a robot workcell under the under the robot programming environment Ch. The middleware provides higher level programming of an automation cell in an environment that supports easy integration of mechantronic devices with the ability to interface with low level device drivers.
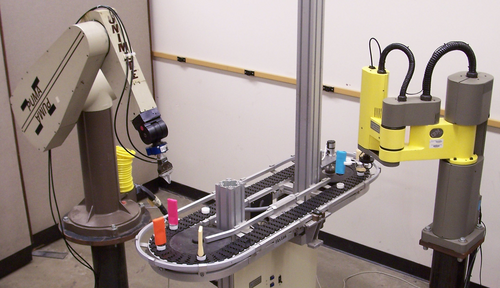
Automation workcell in the
Integration Engineering Laboratory
System Requirements

|
(1) | Ch Standard or Professional Edition version 5.5.0.13221 or higher. Ch is available for download from SoftIntegration. |
| (2) | The Ch PMAC 2.0 package. |