Path Planner Demo: Autonomous Robot Exploration.
This demo seeks to have a NXT robot to get to the desired destination while avoiding obstacles on its way.
Requirements:
Main Program Logic:

Function calculateDistance() Program Logic:

Function calculateOrientation() Program Logic:

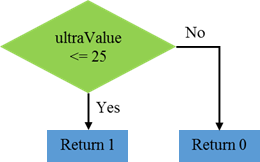
Function checkObstacle() Program Logic:
Function savePosition() Program Logic:
